




Um motor hidráulico converte energia hidráulica em energia mecânica: um eixo rotativo. Ele utiliza a pressão hidráulica e fluxo para gerar torção e rotação.
Você pode usar um motor hidráulico para muitas aplicações, como:
– Guinchos;
– Unidades de guindaste;
– Guindastes auto-impulsionados;
– Escavadoras;
– Unidades misturadoras e agitadoras;
– Moinhos de rolo, etc.
-O design de um motor hidráulico e de uma bomba hidráulica são bem similares, por esse motivo, algumas bombas com deslocamento de volume fixo podem também der utilizadas como motor hidráulico.
Diferentes tipos de motores hidráulicos
O motor hidráulico deve ser engrenado aos requerimentos do sistema hidráulico, problemas como carregamento, alcance de carregamento, velocidade, manuntenção, etc. devem ser levados em consideração. Existem diferentes tipos de motores hidráulicos, como:
Motores hidráulicos de engrenagem
– Motor hidráulico de engrenagem
– Motor epicíclico de engrenagem
Motores hidráulicos de ventoinha
– Motor de ventoinha balanceado
Motores hidráulicos de pistão
– Motor de pistão axial
– Motor de pistão radial
Atuadores de turno parcial
– Atuador rotativo
– Atuador de cremalheira e pinhão
A energia produzida por um motor hidráulico é determinada pelo fluxo e queda de pressão do motor. O deslocamento e a queda de pressão determinam a torção que é gerada, e a saída de energia é assim diretamente proporcional à velocidade. O alcance de motores de alta velocidade é até 10.000 rpm, e de mínima velocidade é de 0.5 rpm.
Note que motores hidráulicos de baixa velocidade são projetador para grandes torções geradas em baixa velocidade. Motores de alta velocidade possuem melhores características operacionais em velocidades de no mínimo 500 rpm.
Motores hidráulicos de engrenagem
Motores hidráulicos de engrenagem são geralmente utilizados em hidráulicas móveis e maquinário de agricultura para conduzir correias transportadoras, placas de dispersão, transportadores de parafuso ou ventoinhas.
Existem dois tipos diferentes de motores hidráulicos de engrenagem. O motor de engrenagem, que é muito similar em projeto à bomba externa de engrenagem, e é um motor de alta velocidade. O motor epicíclico de engrenagem, também conhecido como órbita ou motor de engrenagem de anel, é um motor de baixa velocidade.
Motor hidráulico de engrenagem
Motores de engrenagem e motores de pistão axial são motores de alta velocidade. Se sua operação necessita de uma velocidade melhor, é possível reduzir a velocidade de saída do eixo utilizando engrenagens. A pressão operacional dos motores de engrenagem é geralmente baixa: entre 100 e 150 bar. Entretanto, os motores modernos de engrenagem são capazes de operar em pressões contínuas de até 250 bar.
Características principais de motores de engrenagem:
– Baixo peso e tamanho;
– Pressões relativamente altas;
– Baixo custo;
– Grande variedade de pressões;
– Grande variedade de temperatura;
– Design simples e durável;
– Grande variedade de viscosidade.
Uma grande desvantagem dos motores de engrenagem é que eles fazem muito barulho. Motores de engrenagem com apenas uma direção de rotação são projetadas exatamente como as bombas externas de engrenagem. Um motor de engrenagem pode mudar a direção de rotação drena a porta de cápsula e a pressão axial dos campos é diferente. A eficiência do motor de engrenagem é relativamente baixa, devido ao vazamento de óleo.
Parâmetros comuns:
– Volume de deslocamento: de 3 a 100 cc;
– Pressão máxima: até 250 bar;
– Variedade de velocidades: de 500 a 4000 rpm;
– Torção máxima: até 400 Nm.
Motor epicíclico de engrenagem
Os motores epicíclicos de engrenagem são também chamados de motores de órbita ou motores de engrenagem de anel. Diferente dos motores de engrenagem, o motor de órbita possui vazamento de óleo bem baixo, e pode produzir grandes torções em velocidades muito baixas (5 rpm).
Características principais:
– Baixo vazamento de óleo;
– Grande torção a baixas velocidades;
– Grande volume de deslocamento;
– Tamanho relativamente pequeno;
– Pouco nível de barulho.
Bem como os motores de engrenagem, o rotor do motor de órbita possui um dente a menos que o estator. Por causa da diferença nos dentes, câmaras inclusas são formadas dentro do motor de órbita.
Eles estão disponíveis em dois tipos: um possui um eixo central e o outro um eixo cardan. Motores de órbita com eixo central são amplamente utilizados em sistemas hidráulicos.
Já o motor de órbita com eixo cardan consiste de um rolo cilíndrico no conjunto de engrenagens de roda. É apenas utilizado para aplicações especiais (altas pressões, muito alta eficiência e vida útil maior).
Parâmetros comuns:
– Volume de deslocamento: de 10 a 1000 cc;
– Pressão máxima: até 250 bar;
– Variedade de velocidades: de 5 a 1200 rpm;
– Torção máxima: até 4000 Nm.
Motores hidráulicos de ventoinha
Motores hidráulicos de ventoinha são utilizados em ambas as aplicações: industriais, como em moldagem por injeção e condutor de parafuso; e aplicações móveis, como maquinário de agricultura. Eles possuem menor vazamento interno que os motores de engrenagem e por isso são melhores para velocidades menores: por volta de 100 rpm mínimas. A operação máxima de pressão dos motores hidráulicos de ventoinha é entre 100 e 140 bar, e eles são usadas em hidráulica e pneumática.
Características principais:
– Nível de barulho baixo;
– Fluxo de pulsação baixo;
– Altas torções em velocidades baixas;
– Design simples;
– Manutenção fácil;
– Instalação vertical amigável.
A fim de operar corretamente, as ventoinhas do rotor são pressionadas através do interior do encaixe do motor. Isso é geralmente feito com a espiral de molas de lâmina, mas bastões também podem ser usados. Essa precaução previne problemas com motores estacionários , como ventoinhas afundando nas estrias e fazendo com que o óleo flua por cima ao invés de sobre ele. Mais frequentemente, o rotor é vazio, permitindo assim ser facilmente montado ao eixo da ranhura.
Parâmetros comuns:
– Volume de deslocamento: de 9 a 214 cc;
– Pressão máxima: até 230 bar;
– Variedade de velocidades: de 100 a 2500 rpm;
– Torção máxima: até 650 Nm.
Motores hidráulicos de pistão
Motores hidráulicos de pistão são usados para conduzir equipamentos móveis e de construção, guinchos, guindastes de navio e todos os tipos de equipamento hidráulico de trabalho pesado, para trabalho no mar e fora dele.
Combinados a altas velocidades com grande volume de deslocamento, opera a altas temperaturas. Se a sua operação necessita de uma quantidade significativa de energia, um motor hidráulico de pistão é a melhor opção. Queira você uma instalação que necessita de altos torções ou altas velocidades, é determinada então a escolha de um dos dois: axial ou radial.
Motores de pistão de lançamento aumentam o deslocamento substancialmente porque cada pistão carrega múltiplos lançamentos por rotação no eixo. Consequentemente, um motor de pistão de lançamento produz torções de alta operação.
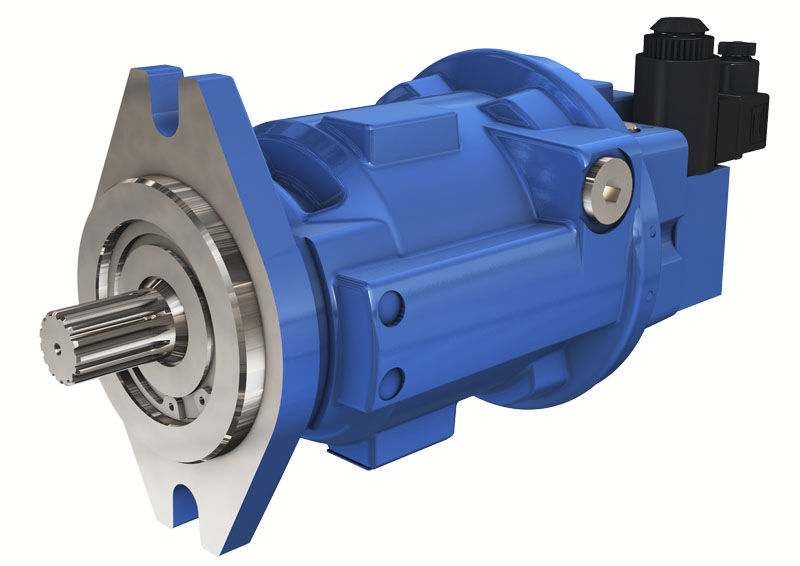
Motor de pistão axial
Similares a bombas de pistão, os motores de pistão axial funcionam com um eixo dobrado no projeto ou o princípio do prato marulhado. O tipo de deslocamento fixo funciona como um motor hidráulico, e o tipo de deslocamento variável funciona mais como uma bomba hidráulica. Motores de deslocamento fio podem ser utilizados em ambos circuitos de loop aberto ou fechado.
No projeto de eixo dobrado, os pistões se movem para cima e para baixo com o furos do bloco do cilindro. Esse movimento é convertido em movimento rotacional através da junta do pistão na borda condutora. No design do prato marulhado, o pistão se move para cima e para baixo e por dentro do bloco e cilindro, virando-o, quando ele vira o eixo condutor através da cavilha conectada.
Parâmetros comuns:
– Volume de deslocamento: de 10 a 1000 cc (em multi-lançamento até 1500 cc);
– Pressão máxima: até 450 bar;
– Variedade de velocidades: de 500 a 11000 rpm;
– Torção máxima: até 10750 Nm.
Motor de pistão radial
Motores de pistão radial são utilizados em tratores de lagartas, gruas, guinchos e equipamento de perfuração do solo. São capazes de produzir altas torções em velocidades muito baixas, até mesmo em meia rotação por minuto.
Os pistões em radial formam uma forma de estrela, são perpendiculares e conectados ao eixo. O movimento retilíneo dos pistões é transformado em movimento rotacional pelo eixo excêntrico.
Parâmetros comuns:
– Volume de deslocamento: de 10 a 8500 cc;
– Pressão máxima: até 300 bar (em multi-lançamento até 450 bar);
– Variedade de velocidades: de 0.5 a 2000 rpm;
– Torção máxima: até 32000 Nm (em multi-lançamento até 45000 Nm).
Atuadores de turno parcial
Atuadores de turno parcial são usados para lâminas de banca, válvulas de abertura borboleta e para operações de empurrar, puxar e levantar.
Esse tipo de atuador, também conhecido como atuador de rotação, pode rodar apenas para a direita ou esquerda em um ângulo de 300º. Eles operam em pressões por volta de 70 bar, e são muito menores que cilindros, não tendo nenhuma parte externa móvel.
Possuem um design muito simples, em duas versões: uma possui duas asas no eixo, e o outro possui duas divisões internas. Essa construção traz o suporte giratório de volta a 120° e dobra a torção. A primeira versão é inclinada a baixo e contínuo vazamento, junto a asa. Isso significa que, durante a operação, a rotação do atuador pode estar sob constante pressão para funcionar corretamente.
Atuadores de turno parcial realizam um movimento de giro através do fim do eixo e quando pressurizado por um fluído hidráulico, independente do tipo ou projeto da unidade. O ângulo que um atuador de turno parcial move através é limitado por paradas fixas ou ajustáveis. Por isso, o número de aplicações em que pode ser utilizado é limitado.
A Global HP possui uma equipe extensa de profissionais em motores hidráulicos, bem como um inventário substancial desse tipo de produto. Contate a Global HP hoje mesmo e obtenha a melhor qualidade para sua aplicação!



